
Clasificación de Nubes de Puntos LiDAR: Algoritmos Fundamentales, Teoría y Aplicaciones Profesionales
La clasificación de nubes de puntos LiDAR es uno de los procesos más cruciales dentro del análisis geoespacial, ya que permite diferenciar entre el terreno y los elementos sobre él, como vegetación, edificaciones y vehículos. Este procedimiento técnico y teórico es la base para generar Modelos Digitales del Terreno (MDT), análisis forestales, diseños de ingeniería civil, y estudios urbanos de alta precisión.
CLASIFICACIÓN DE NUBE DE PUNTOS LIDARCURVAS DE NIVELGEODESIA
Victor Palma
5/10/20252 min read
¿Qué es la clasificación de una nube de puntos?
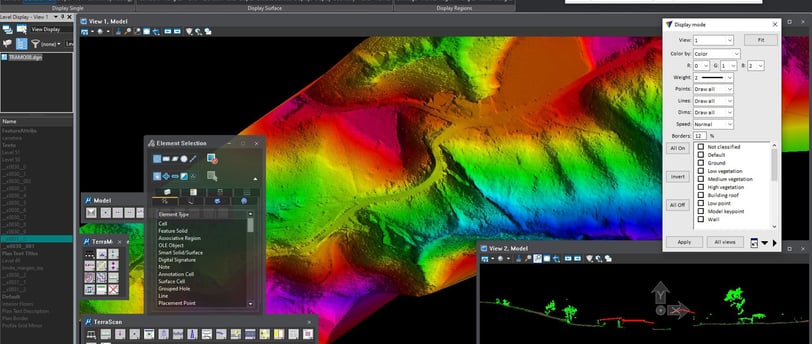
Una nube de puntos LiDAR es una colección densa de puntos 3D georreferenciados. Cada punto puede representar un objeto distinto: el suelo, una planta, un edificio, o un objeto móvil. La clasificación consiste en etiquetar estos puntos según la clase a la que pertenecen. Las clases comunes (según ASPRS LAS) incluyen:
Clase 2: Terreno
Clase 5–7: Vegetación baja, media y alta
Clase 9: Edificaciones
Clase 18: Vehículos, entre otros
Fundamentos teóricos: principales algoritmos de clasificación
A lo largo de los años, diversos investigadores han desarrollado métodos robustos para este proceso. Los más relevantes son:
🔹 1. Algoritmos geométricos: Axelsson Ground Filter (2000)
El algoritmo de Axelsson (2000) es una referencia obligatoria en clasificación de terreno. Se basa en una técnica de crecimiento progresivo de superficies TIN (Triangulated Irregular Networks). A partir de puntos semilla ubicados en las cotas más bajas del terreno (low points), se construye una malla que se expande, siempre bajo restricciones de ángulo y altura para evitar capturar vegetación o estructuras.
Referencia:
Axelsson, P. (2000). DEM generation from laser scanner data using adaptive TIN models. ISPRS Journal of Photogrammetry and Remote Sensing.
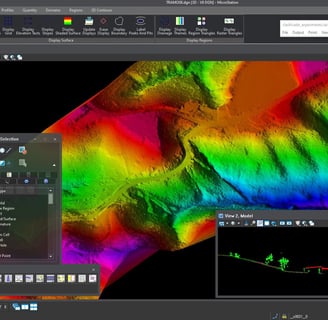
Este método está implementado en software como TerraScan (Terrasolid), LAStools, y otros motores de clasificación profesional.
🔹 2. Métodos morfológicos progresivos
Zhang et al. (2003) desarrollaron el método Progressive Morphological Filter, ampliamente usado en áreas urbanas o con vegetación densa. Se aplica una operación morfológica iterativa que, a distintas escalas, diferencia objetos elevados del terreno natural.
Referencia:
Zhang, K., et al. (2003). A progressive morphological filter for removing nonground measurements from airborne LiDAR data. IEEE TGRS.
Ideal para entornos con árboles, casas y pendientes mixtas.
🔹 3. Técnicas de aprendizaje automático (Machine Learning)
Con el avance de la inteligencia artificial, ahora se utilizan clasificadores como:
Random Forest
Support Vector Machines (SVM)
Redes Neuronales (Deep Learning)
Estas técnicas requieren entrenamiento previo con muestras etiquetadas y se integran fácilmente en software como LiDAR360, CloudCompare o plataformas personalizadas en Python. Logran resultados sobresalientes en análisis forestales y detección de infraestructura.
Aplicaciones prácticas de la clasificación
La clasificación precisa de puntos LiDAR permite generar productos clave en distintas industrias:
🔸 Topografía: Modelos digitales de terreno (DTM), curvas de nivel, diseño vial
🔸 Forestal: Estimación de biomasa, altura de copas, estratificación de vegetación
🔸 Urbano: Detección automática de techos, construcciones y análisis de movilidad
🔸 Ingeniería civil: Estudios para canales, presas, rellenos y excavaciones
En UAV Procesos: Precisión y ciencia aplicada
En UAV Procesos, aplicamos metodologías de clasificación respaldadas por literatura científica y normas internacionales. Combinamos el algoritmo de Axelsson, filtros morfológicos y clasificación por inteligencia artificial según el tipo de proyecto.
Gracias a nuestro dominio en herramientas como TerraScan, LiDAR360 y procesos semi-automatizados, garantizamos resultados de alto nivel técnico, ideales para instituciones, gobiernos y sector privado.
📩 ¿Deseas una clasificación profesional para tu proyecto?
Contáctanos en www.uavprocesos.com y déjanos ayudarte a transformar tus datos LiDAR en conocimiento valioso.